Arduino Tabanlı Sparc Robotunun Kablolama ve Kontrol Sistemi
Platformumuzdaki en çok okunan ve popüler makaleleri görmek için Trendler bölümüne geçebilirsiniz.
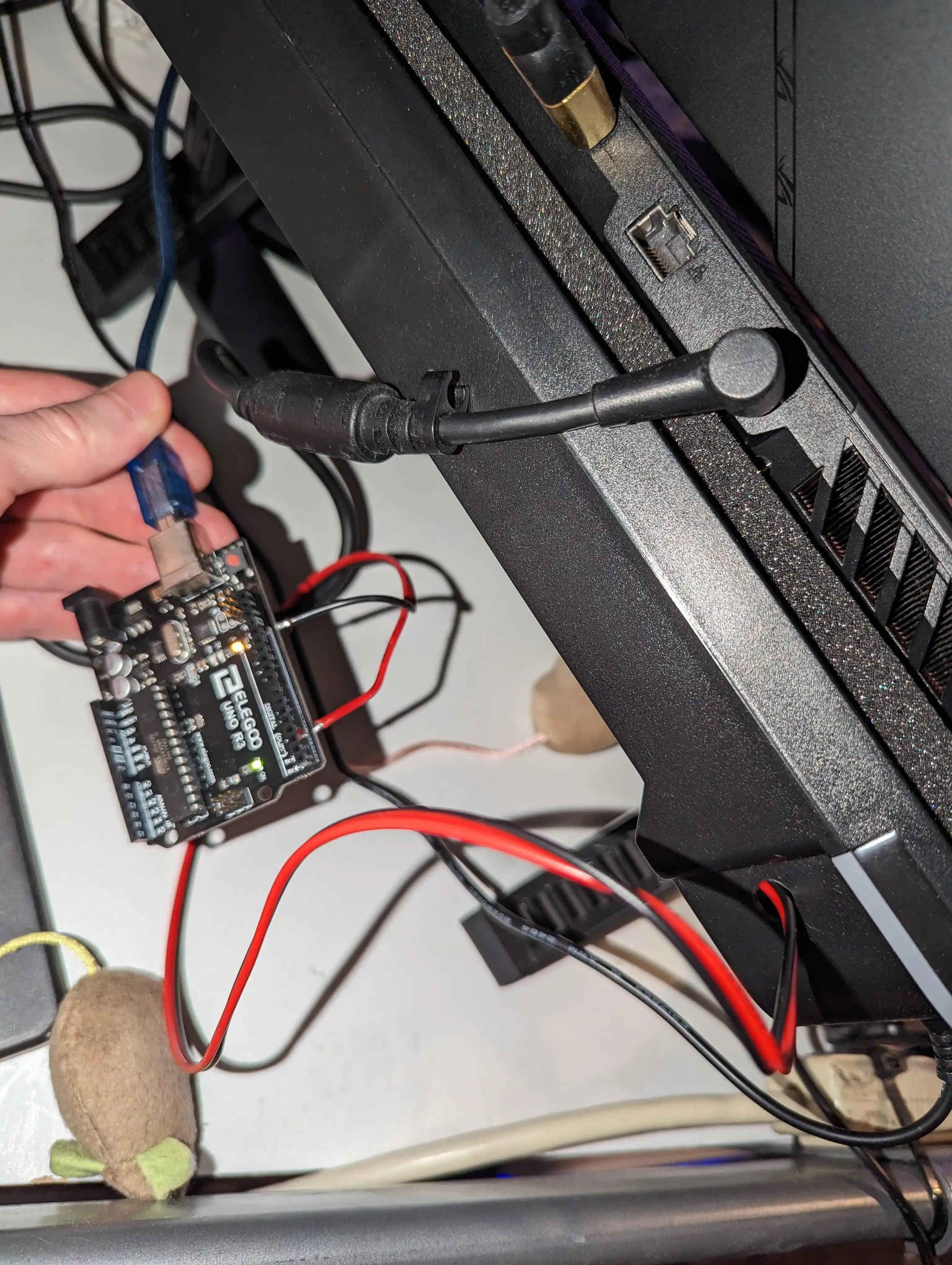
Ev yapımı robot projeleri, elektronik ve programlama alanlarında uygulamalı deneyim kazanmak için ideal platformlardır. Sparc adlı robot, Arduino tabanlı bir sistemle geliştirilmiş ve çeşitli sensörler ile kontrol elemanları entegre edilmiştir. Bu makalede, Sparc robotunun kablolama yapısı, kullanılan bileşenler ve kontrol yöntemleri detaylı şekilde incelenecektir.
Sparc Robotunun Donanım Bileşenleri
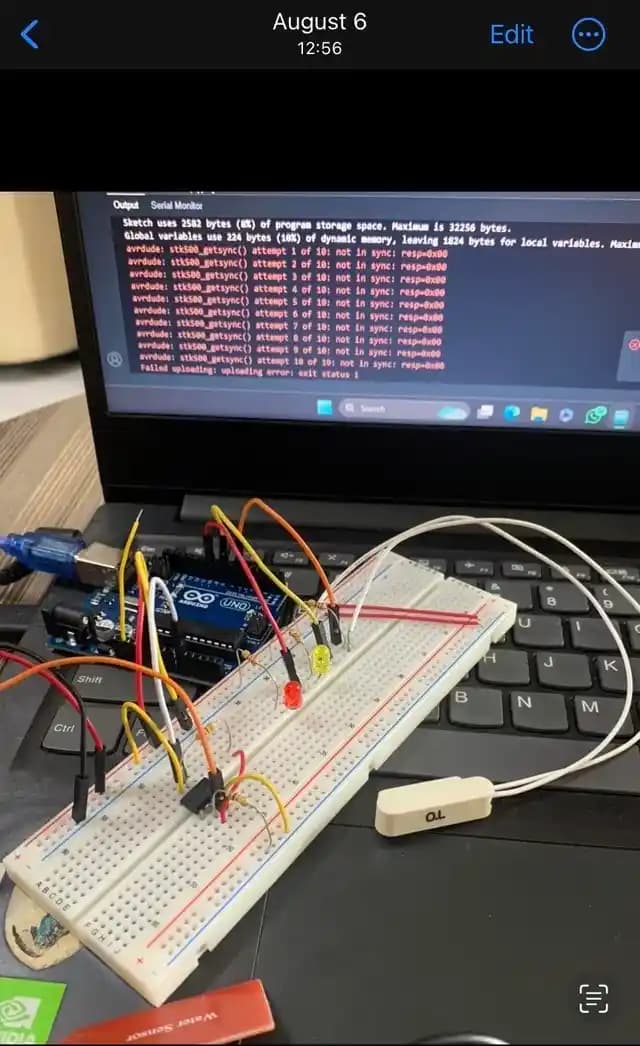
Sparc, Arduino mikrodenetleyici etrafında şekillenen bir yapıya sahiptir. Robotun temel bileşenleri şunlardır:
Easy VR Ses Modülü: Sesli komutları algılamak ve Arduino'ya iletmek için kullanılır. Bu modül, robotun sesli komutlarla kontrol edilmesini sağlar.
Röleler: Motorlar ve ışıklar gibi yüksek akım çeken bileşenlerin kontrolü için röleler kullanılmıştır. Röleler, Arduino'nun düşük akım çıkışlarını yüksek akım gerektiren cihazlara dönüştürür.
Motorlar: Robotun hareketini sağlayan motorlar, röleler aracılığıyla kontrol edilir. Motorların ileri ve geri hareketi için ek bir röle motorların polaritesini değiştirmektedir.
Sonar Sensörleri: Engelleri algılayarak robotun çarpışmasını önleyen sonar sensörler, otonom hareket kabiliyeti kazandırır.
Klavye Kontrolü: Alternatif kontrol yöntemi olarak, robot küçük bir klavye ile de yönetilebilir. Bu klavye, özel bir mantık kapısı (muhtemelen XOR kapısı) aracılığıyla Arduino'ya bağlanmıştır.
Ayrıca Bakınız


Kablolama ve Kontrol Mantığı
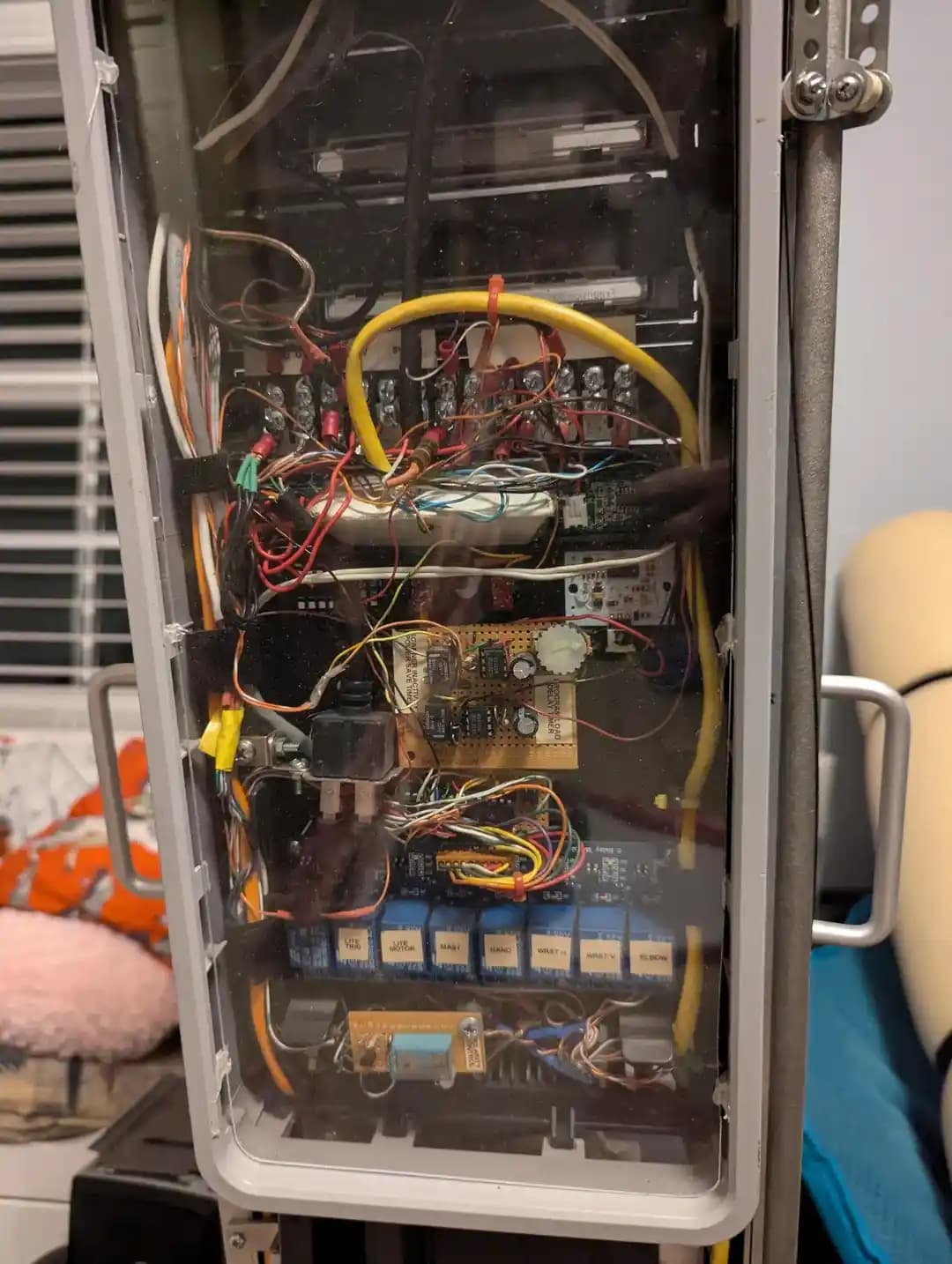
Sparc robotunun kablolama yapısı, çok sayıda bileşenin bir arada çalışmasını mümkün kılacak şekilde tasarlanmıştır. Arduino, ses modülünden aldığı komutları işleyerek ilgili röleleri aktive eder. Röleler, motorların ve ışıkların çalışmasını sağlar. Motorların yön değiştirmesi için kullanılan röle, motorların polaritesini tersine çevirir.
Sesli komutların yanı sıra, robot klavye ile de kontrol edilebilir. Bu kontrol yöntemi, XOR mantık kapısı gibi temel dijital devre elemanları kullanılarak gerçekleştirilmiştir. Bu sayede, kullanıcı hem sesli komutlar hem de manuel girişlerle robotu yönetebilir.
Sonar sensörler, robotun önündeki engelleri tespit ederek Arduino'ya bilgi gönderir. Arduino, bu bilgiyi işleyerek motorların hareketini engeller veya yön değişikliğine sebep olur. Böylece robot, çevresine duyarlı ve otonom hareket edebilen bir yapıya kavuşur.

Kablolama Karmaşıklığı ve Elektronik Tasarım
Sparc robotunun kablolama düzeni karmaşık görünse de, her bileşenin işlevsel entegrasyonu için özenle planlanmıştır. Rölelerin kullanımı, yüksek akım gerektiren motor ve ışıkların Arduino tarafından güvenli şekilde kontrol edilmesini sağlar. Mantık kapıları ve ses modülü gibi ek bileşenler, robotun çoklu kontrol seçeneklerine sahip olmasını mümkün kılar.
Bu tür projelerde, kablolama düzeni genellikle karmaşık ve zor anlaşılır olabilir. Ancak Sparc robotunda kullanılan bileşenlerin işlevleri ve bağlantı şekilleri, sistemin genel çalışma prensibini anlamak için yeterlidir. Ayrıca, farklı kontrol yöntemlerinin bir arada kullanılması, robotun esnek ve çok yönlü olmasını sağlar.
Sonuç
Sparc robotu, Arduino tabanlı ev yapımı bir robot projesi olarak, sesli komut kontrolü, manuel klavye girişi ve engel algılama gibi gelişmiş özelliklere sahiptir. Kablolama yapısı, röleler, mantık kapıları ve sensörler gibi çeşitli elektronik bileşenlerin entegrasyonunu içerir. Bu sayede, robot hem kullanıcı komutlarına yanıt verebilir hem de çevresel engellerden kaçınabilir. Proje, elektronik ve robotik alanında uygulamalı bilgi edinmek isteyenler için önemli bir örnek teşkil etmektedir.
"Arduino, ses modülü ve rölelerin bir araya gelmesiyle Sparc, çok yönlü ve fonksiyonel bir robot haline geliyor."